电 话:18853578090
座 机:0535-3020587
邮 箱:tsingkejia@163.com
地 址:烟台(山东)自贸区烟台经济技术开发区古现街道台北南路7号
清华大学机械系团队联合北京卫星制造厂、烟台九游会AG研究院创新研发了轻量化五轴全并联加工功能模块,采用“全向移动平台+高刚度机械臂+五轴并联加工部件”构型,研制了一套移动式混联加工机器人。
近期,该项成果已在《国家科学评论》(National Science Review, NSR)发表,获业内广泛关注与好评。

该机器人攻克了跨尺度定位及测量、精度主动调控等关键技术,具备大范围定位和局部精细加工能力,一举解决了大型工件传统加工中机床庞大、成本高和大工件工序转移不方便等的难题。已在航天制造企业应用于多种型号产品生产,解决了航天器舱体、卫星结构等大型构件的高精加工难题,为我国大型航天器结构件的加工制造提供了自主可控的技术装备。
01/航天构件制造
面临的挑战•

典型大型复杂构件:空间站大型舱体结构件

典型大型复杂构件:飞机部组件
航天器舱体、卫星整星结构、飞机部组件等大型复杂构件是航空、航天等制造业领域内装备的核心零部件,通常具有尺寸大、型面复杂、结构刚性弱、精度要求高等特点,其结构形态与严苛的工艺要求对加工装备性能提出了严峻挑战:
1构件“大型化”
要求加工装备具备足够大的工作空间;
2构件“复杂化”
对加工装备的自由度和灵活性提出了更高的要求;
3大构件“局部精度化”
则对加工装备的精度提出了更大挑战。

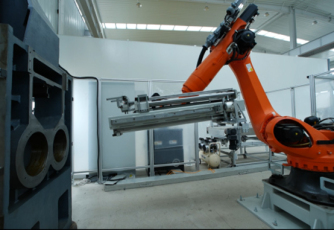
移动式混联加工机器人
对舱外载荷安装支架进行原位铣削
02/大型复杂构件
目前的制造模式•
大型复杂构件亟需探索变革性的制造模式,研制高性能的加工装备,突破现有加工技术瓶颈,解决大型复杂构件的高质量加工难题。
1
采用大行程五轴机床并辅以人工的制造方式,但机床引进成本高昂,无法大量部署,此外,制造技术瓶颈也导致装备的大型化发展模式难以为继;
2
采用“分体离线加工-在线检测修配”的加工方式,加工过程中需多次变换基准、工艺不稳定、一次装调合格率低、质量一致性差,且加工工序繁多、生产周期长;
3
对于尺寸或质量超出机床承受范围的构件,主要通过人工作业,对工人技术要求高,且效率低、产品质量及一致性无法保证,尤其工作环境恶劣、劳动强度大、严重影响工人的身体健康。
03/创新研发
轻量化五轴并联机构•
在此背景下,清华大学机械系团队联合北京卫星制造厂、烟台九游会AG研究院开展技术攻关,提出了以机器人化、小型化、便携式为主要特征的大型复杂构件柔性可重构加工制造新模式,发明了具有姿态耦合大摆角输出特色的轻量化五轴并联机构。
在此基础上,该团队采用“全向移动平台+高刚度机械臂+五轴并联加工部件”构型研制了一套移动式混联加工机器人,该机器人具备大范围定位和局部精细加工能力。
该机器人已在航天制造企业应用于多种型号产品生产,完成了大型航天器舱体柱段和锥段焊口铣削、舱外载荷安装支架原位铣削、大型碳纤维网格承力结构件外圆铣削和端面磨削,解决了航天器舱体、卫星结构等大型构件的高精加工难题。
移动式混联加工机器人使大型复杂类构件的加工模式产生了颠覆性变化,为我国大型航天器结构件的加工制造提供了自主可控的技术装备。